How to callibrate the grippers
The grippers come pre-calibrated from fabric.
Howerver, by making use of them, they can uncallibrate.
If the gripper of one Fastbot is not able to grasp the cubes, this means that you need to re-callibrate it
Callibration procedure
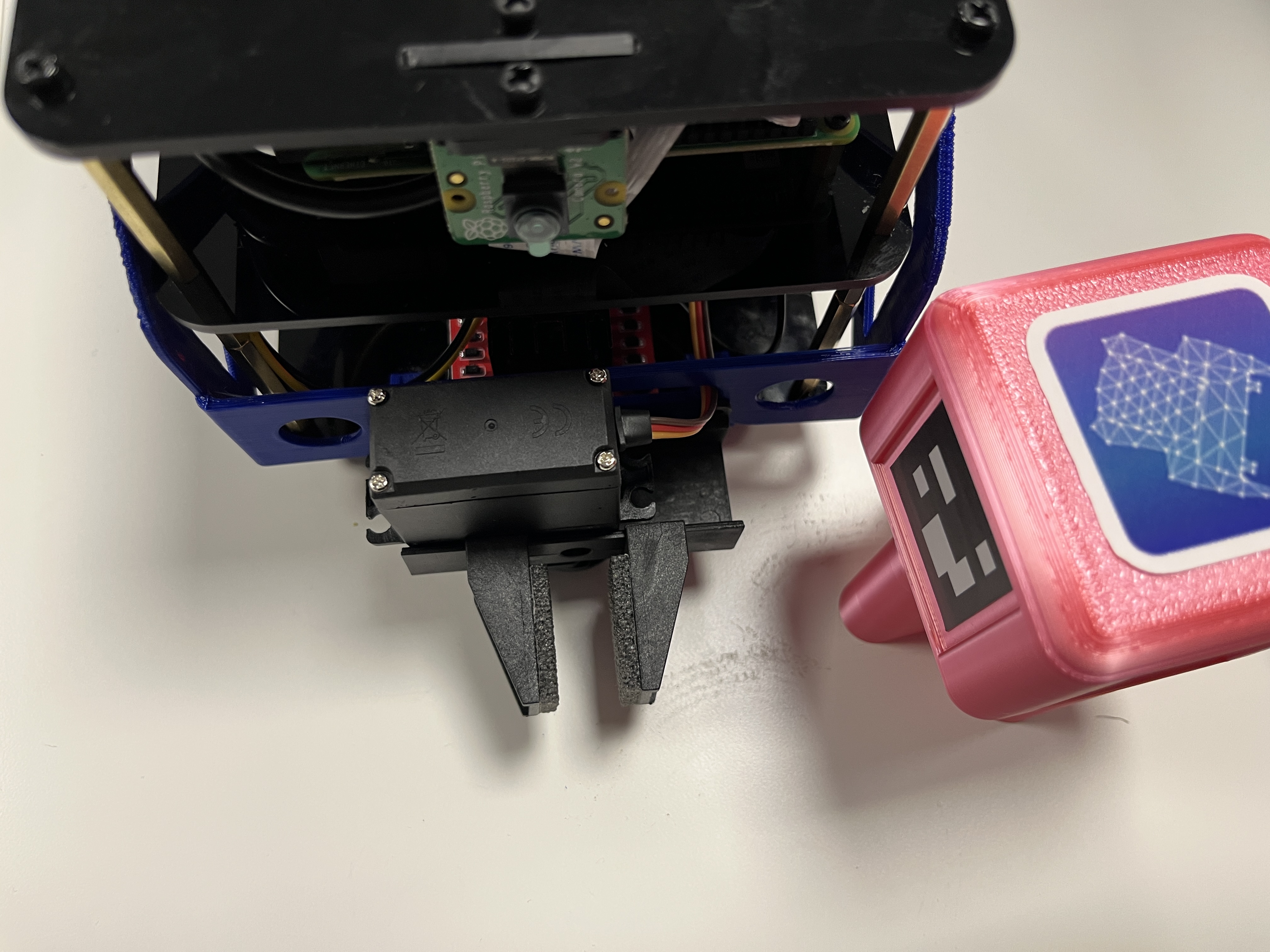
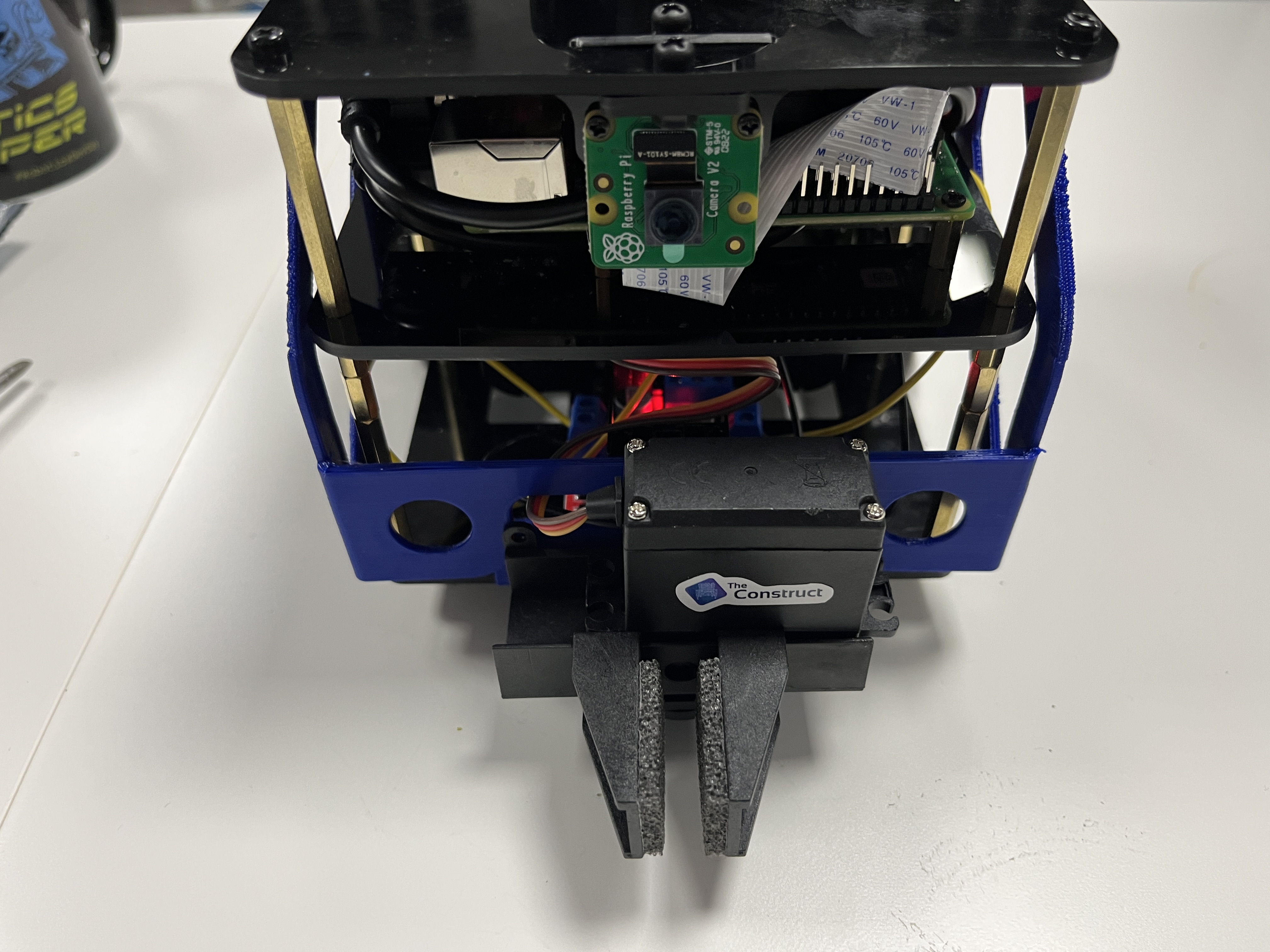
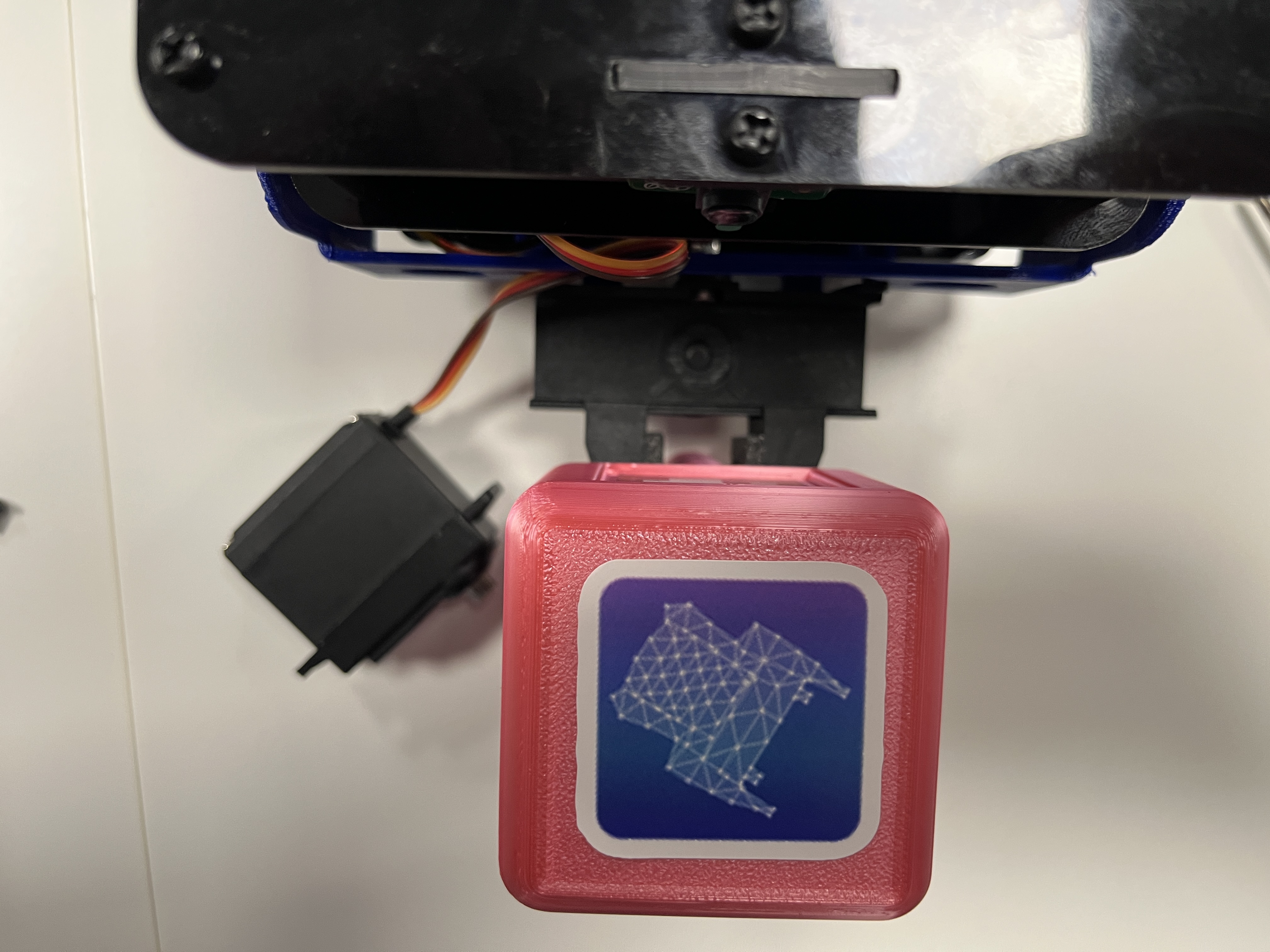
This is a gripper that needs callibration
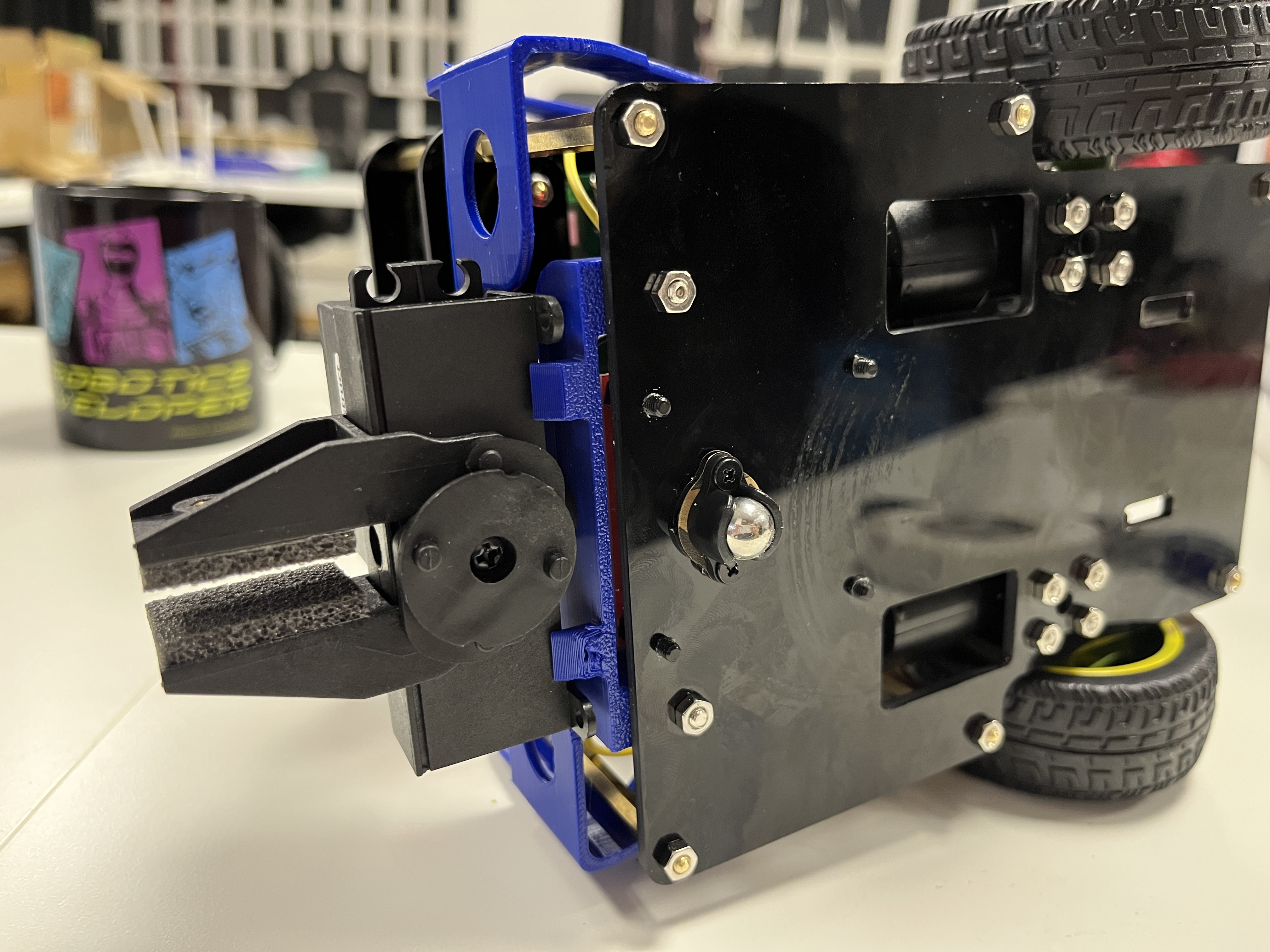
Turn it upside down
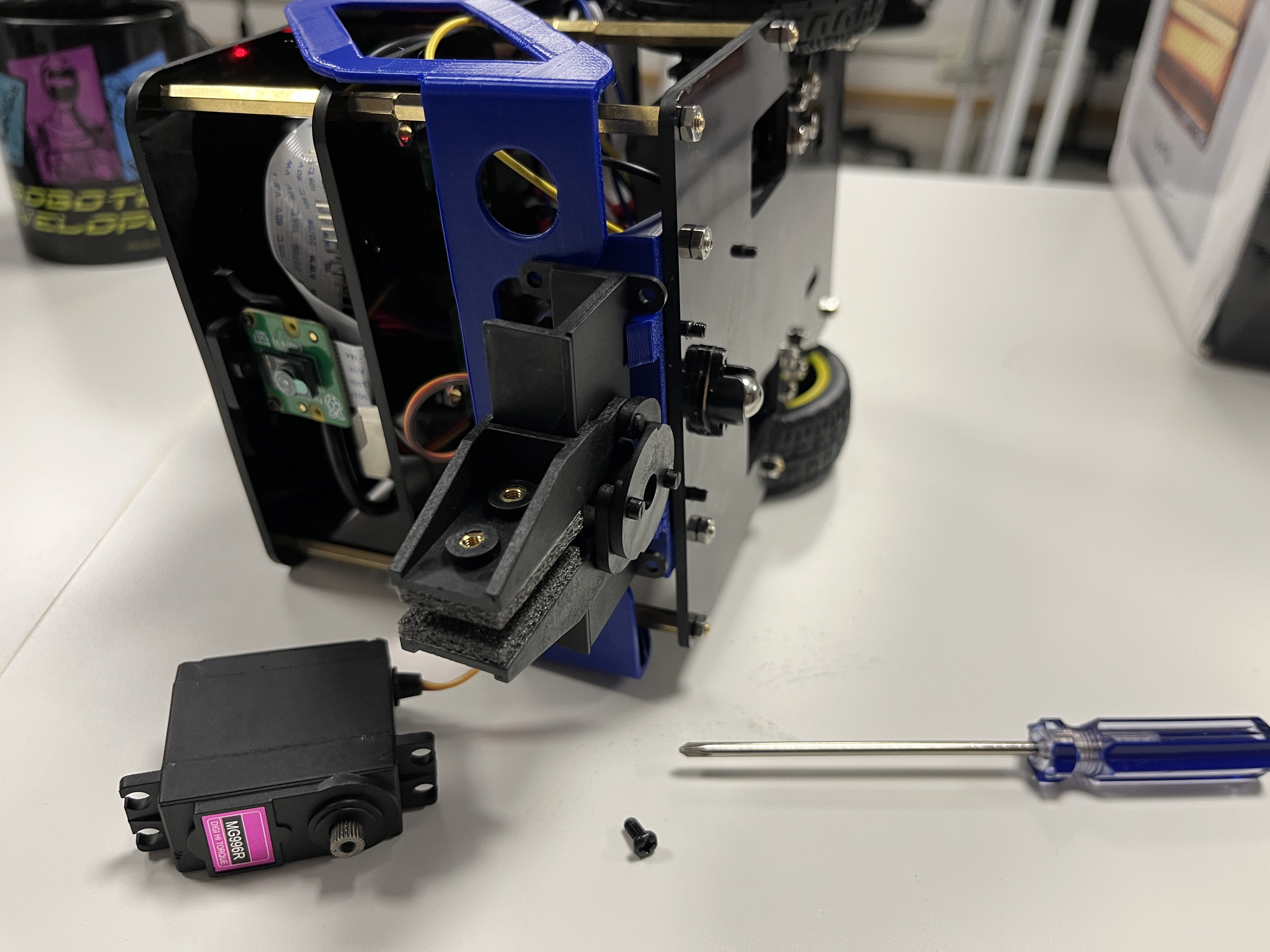
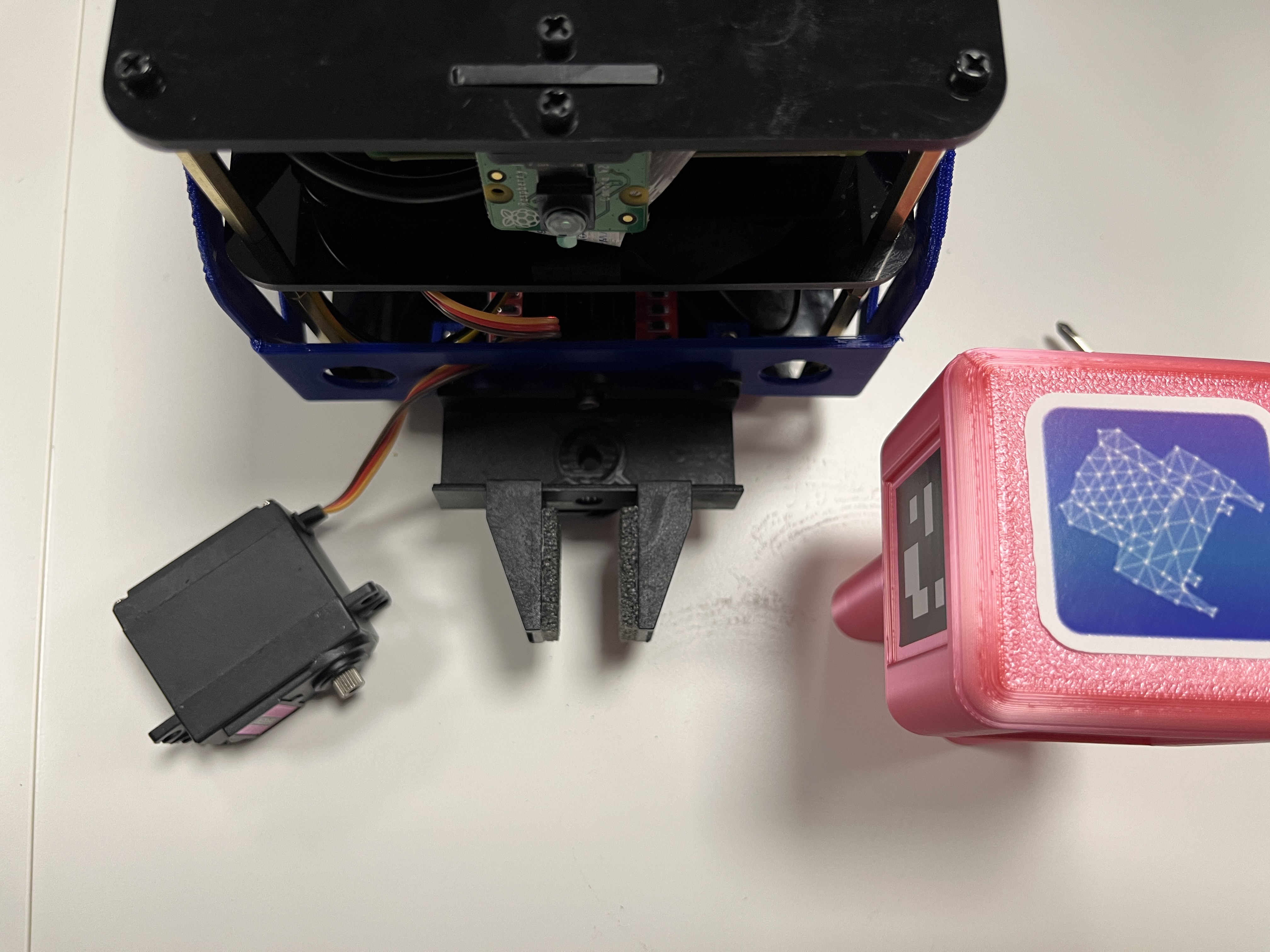
Remove the screw and the motor
Put the cube between the gripper fingers and close it as much as possible:
Remove the cube from the gripper and close just a little bit more the gripper fingers.
Then connect to the robot by ssh and then send the command:
ros2 action send_goal /fastbot_1/gripper
Finally, screw back the motor on the top of the gripper